

Gambaran Keseluruhan Sistem
Sistem penguatkuasaan penimbangan tanpa henti terutamanya menyediakan fungsi aplikasi perniagaan untuk stesen pengesanan lebihan muatan di tepi jalan tetap. Ia terutamanya menggunakan kaedah penguatkuasaan bukan hubungan, bergantung pada peralatan pra-pemeriksaan untuk melengkapkan pengesanan dan penimbangan kenderaan pengangkutan kargo. Sistem ini boleh menerbitkan maklumat lebihan muatan dan data senarai hitam melalui papan mesej berubah-ubah, dan ia menguruskan proses perniagaan secara digital melalui perisian stesen pengesanan lebihan muatan di tepi jalan tetap.
Reka Letak Biasa
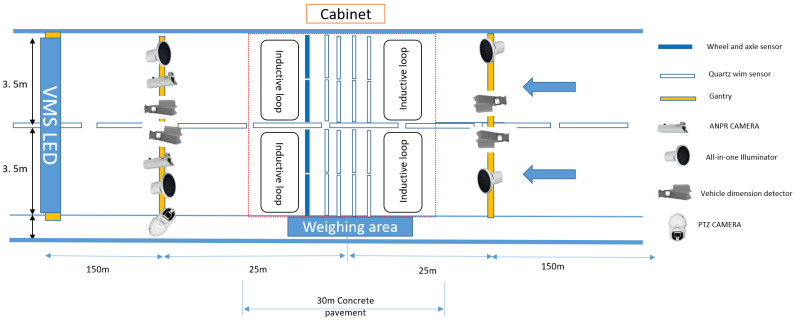
Penerangan Fungsi
●Bagi kenderaan yang melalui lorong lebuh raya utama, sistem penimbang secara automatik boleh mengesan jumlah berat kenderaan, berat gandar, bilangan gandar dan tayar, jarak gandar, kelajuan kenderaan dan pecutan kenderaan.
●Sistem boleh mengasingkan kenderaan dengan tepat dan berkesan serta mengendalikan keadaan pemanduan yang tidak normal seperti beratur kenderaan dan menukar lorong, memastikan surat-menyurat antara kenderaan dan data.
●Sistem ini mempunyai fungsi penimbal automatik, membolehkannya menyimpan sejumlah data. Jika penghantaran data ke komputer terlebih muatan di tepi jalan gagal, sistem boleh menghantar semula data, memastikan keunikan dan integriti data.
●Maklumat penimbangan boleh dihantar ke komputer kawalan bahagian belakang melalui antara muka data yang ditentukan.
●Sistem ini mempunyai fungsi diagnosis diri kerosakan, dan apabila sebarang peralatan atau kegagalan talian berlaku, sistem boleh mendapatkan maklumat kerosakan yang sepadan.
●Sistem ini boleh memenuhi keperluan operasi tanpa gangguan, berterusan dan semua cuaca dalam mod tanpa pengawasan.
●Untuk kenderaan separuh treler dengan plat lesen hadapan dan belakang yang tidak konsisten, sistem ini menambah peralatan tangkapan kenderaan belakang untuk menangkap kedua-dua plat hadapan dan plat treler.
●Sistem ini boleh menangkap dua imej ciri panoramik kenderaan yang lebih muatan (termasuk paparan penuh kenderaan, plat lesen, warna, model dan ciri geografi yang menonjol).
Komponen Sistem
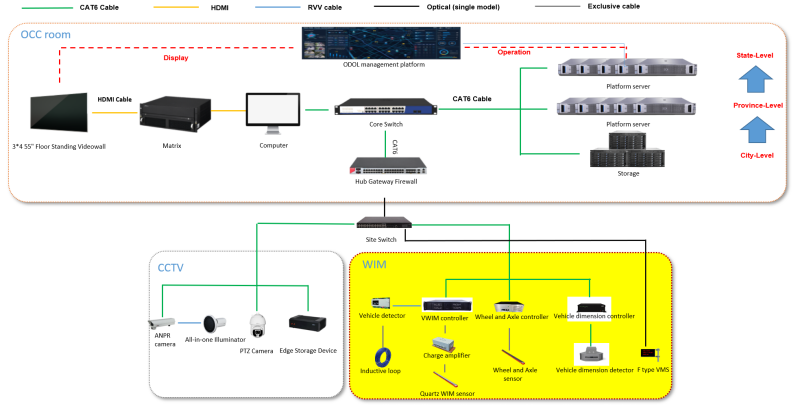
Sistem penguatkuasaan penimbangan tanpa henti terdiri daripada sistem penimbangan berkelajuan tinggi yang dinamik, sistem pengasingan kenderaan, sistem pengecaman kenderaan, sistem pengawasan video tepi jalan, sistem pelepasan maklumat tepi jalan, dan sistem penghantaran integrasi maklumat tepi jalan.
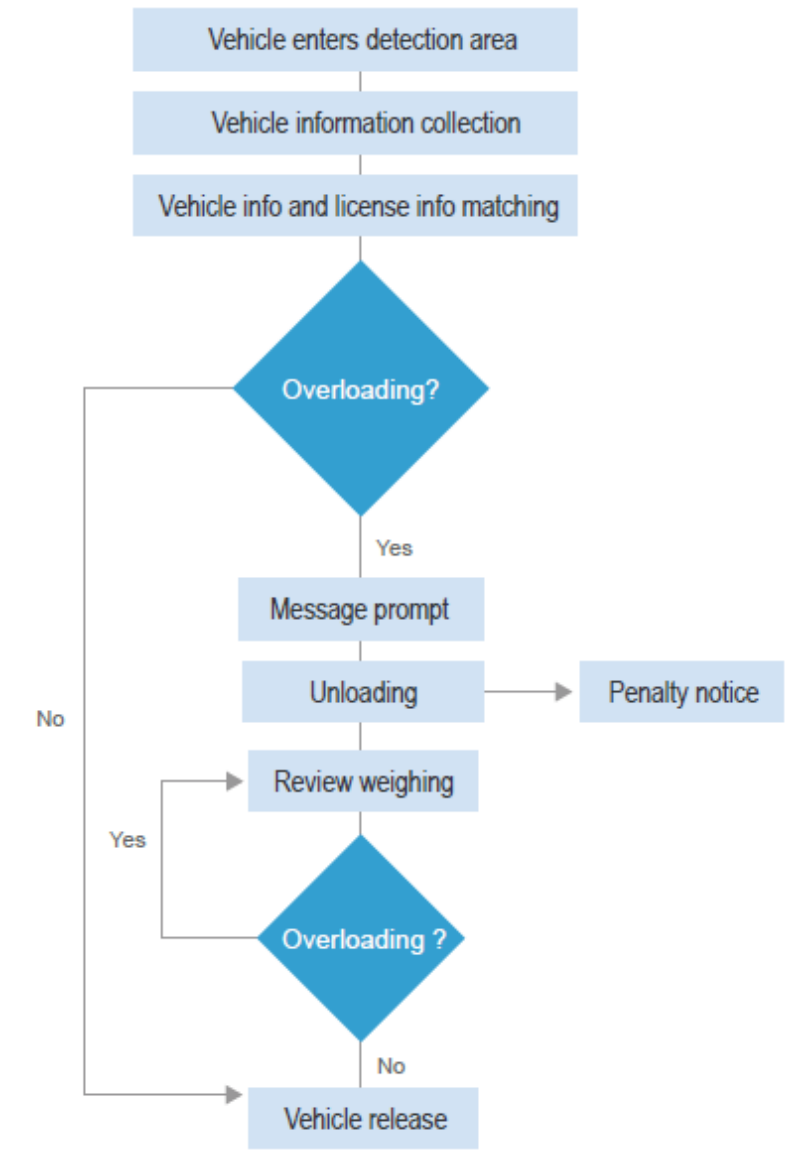
Rajah Proses Penguatkuasaan Timbangan Tanpa henti
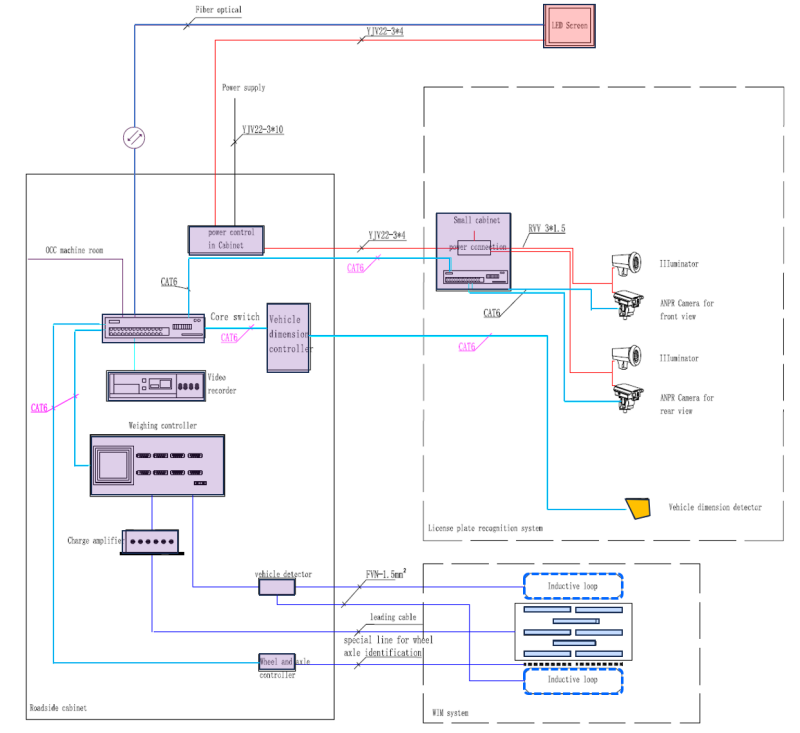
Rajah Topologi Sistem
Petunjuk Teknikal Utama
●Beban gandar (atau kumpulan gandar) maksimum: 40,000 kg
●Beban gandar (atau kumpulan gandar) minimum: 500 kg
●Nilai tamat pengajian: 50 kg
●Julat kelajuan pengesanan dinamik: 0.5–200 km/j
●Tahap ketepatan penimbangan dinamik: Gred 5
●Kadar tangkapan plat lesen waktu siang: ≥98%
●Kadar tangkapan plat lesen waktu malam: ≥95%
●Pengecaman plat lesen dan ketepatan padanan data penimbangan: ≥99%

Enviko Technology Co.,Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Pejabat Chengdu: No. 2004, Unit 1, Bangunan 2, No. 158, Jalan Tianfu 4, Zon Berteknologi Tinggi, Chengdu
Pejabat Hong Kong: 8F, Bangunan Cheung Wang, 251 San Wui Street, Hong Kong
Masa siaran: Sep-13-2024




